© Veit-Lorenz Heuthe, AG Bechinger, Universität Konstanz
So effektiv wie Ameisen: Mini-Roboter erweisen sich als nützlich
Ameisen arbeiten kollektiv zusammen, wenn sie einen Ast bewegen wollen. Forschern aus Konstanz gelang so ein Schwarmverhalten nun mit Robotern, die noch kleiner als die Insekten sind.
Stand:
Robotikexperten haben einen Weg gefunden, nur wenige Mikrometer große Roboter zu einer guten Kollektivleistung zu bringen. Sie brachten einen Schwarm aus bis zu 200 Robotern dazu, Stäbe zu bewegen und in ein Zielgebiet zu bugsieren. Das berichtet die Gruppe um Clemens Bechinger von der Universität Konstanz in der Fachzeitschrift „Science Robotics“.
Gemeinschaftlich jagende Tiere oder Ameisen, die zusammen große Gegenstände transportieren, haben Wissenschaftler zur Gestaltung von Roboterschwärmen inspiriert. In Größenordnungen, die mit bloßem Auge sichtbar sind, funktioniert das schon recht gut.
Sechs Tausendstel Millimeter klein
Aber im Bereich von Mikrometern (Tausendstel Millimetern) kommen Schwierigkeiten hinzu, wie etwa die Brownsche Bewegung – eine scheinbar regellose Zitterbewegung kleiner Teilchen in Flüssigkeiten. Diese betrifft auch die Mikroroboter. „Diese Forschung war aufgrund der Unvorhersehbarkeit in einem so kleinen Maßstab eine unglaubliche Herausforderung“, sagt Erstautor Veit-Lorenz Heuthe von der Universität Konstanz.
Empfohlener redaktioneller Inhalt
An dieser Stelle finden Sie einen von unseren Redakteuren ausgewählten, externen Inhalt, der den Artikel für Sie mit zusätzlichen Informationen anreichert. Sie können sich hier den externen Inhalt mit einem Klick anzeigen lassen oder wieder ausblenden.
Ich bin damit einverstanden, dass mir der externe Inhalt angezeigt wird. Damit können personenbezogene Daten an Drittplattformen übermittelt werden. Mehr Informationen dazu erhalten Sie in den Datenschutz-Einstellungen. Diese finden Sie ganz unten auf unserer Seite im Footer, sodass Sie Ihre Einstellungen jederzeit verwalten oder widerrufen können.
Die aktiven Teile der Mikroroboter sind Siliziumdioxid-Kügelchen mit einem Durchmesser von sechs Mikrometern. Die Hälfte der Kugeln ist mit einer extrem dünnen Kohlenstoffkappe überzogen, die Lichtenergie aufnehmen kann. Das ermöglicht eine Steuerung durch Laser, die die Mikroroboter durch Lichtimpulse geradeaus, nach links oder nach rechts navigieren können.
Zugleich wird in hoher Frequenz die Position jedes einzelnen Kügelchens gescannt. Die Mikroroboter bestehen also – grob gesagt – aus den Mikrokugeln selbst und dem System, das die Position und Ausrichtung jeder Kugel aufnimmt und die Laserimpulse für jede Kugel steuert.
Robotererziehung mit Belohnung
Für das Steuerungssystem nutzten die Forscher Künstliche Intelligenz: ein künstliches neuronales Netzwerk, das bestärkendes Lernen ermöglicht. Dabei gibt es Belohnungen für erwünschte Aktionen, und die Roboter sind darauf programmiert, möglichst hohe Belohnungswerte zu erzielen. Die Roboter lernen also nicht, bestimmte Bewegungen auszuführen, sondern die Belohnungen zu maximieren.
© Veit-Lorenz Heuthe, AG Bechinger, Universität Konstanz
Dabei wird für jeden einzelnen Mikroroboter simuliert, wie die übrigen Schwarmmitglieder sich bewegen müssten, wenn dieser Roboter nicht vorhanden wäre. Aus dem Vergleich zwischen der tatsächlichen Bewegung und der simulierten Bewegung ohne Roboter XY kann der Leistungsanteil für diesen Roboter XY ermittelt werden.
Wenn der Schwarm einen relativ großen Gegenstand in eine bestimmte Position schieben soll, kann für jeden beteiligten Roboter der Leistungsanteil berechnet und ihm in Form einer Belohnung in entsprechender Höhe zurückgemeldet werden. Je höher der Leistungsanteil, desto höher die Belohnung.
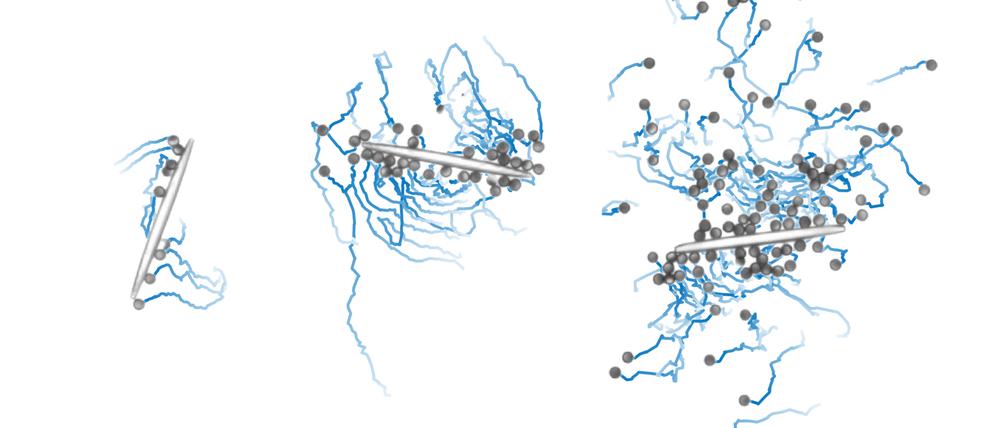
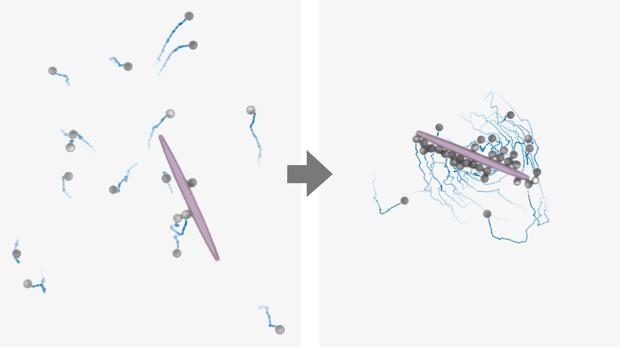
Durch die Anwendung dieses Prinzips brachten die Forscher den Roboterschwarm dazu, Stäbe zu drehen und zu schieben. Auch Hindernisse wie eine Wand oder Säulenstümpfe, an denen der Stab vorbeimanövriert werden musste, hielten die Mikroroboter nicht vom Ziel ab.
„Steuerungsstrategien wie unsere können potenziell die komplexe und automatisierte Montage mobiler Mikromaschinen, programmierbarer Medikamenten-Verabreichungskapseln und anderer fortschrittlicher Labor-auf-einem-Chip-Anwendungen ermöglichen“, schreiben die Studienautoren. Bechinger zufolge liefert das Forschungsprojekt Erkenntnisse zur Verbesserung der Teamarbeit in jedem kollektiven System. (dpa)
- showPaywall:
- false
- isSubscriber:
- false
- isPaid: